- Basic Concept.
- Basic operation: operation which is used most of the time. For example in linear search, “==” operation is a basic operation.
-
What is algorithms? An algorithm is a finite sequence of precise instructions for performing a computation or for solving a problem. (according Rosen in his textbook).
- If you want to develop an algorithm, which properties should you consider?
- Input —> values from a specified set.
- Output —> a set of input values produces a set of output values.
- Definiteness —> steps of an algorithm must be defined precisely.
- Correctness —> correct output values for each set of input values.
- Finiteness —> produce the desired output after a finite steps.
- Effectiveness —> perform each step in a finite amount of time.
- Generality —> applicable for all problems of the desired form.
- Runtime: number of execution of basic operator in a specific program. For example in linear search, runtime is N because it execute basic operation “==” N times (N is length of array).
- Asymptotic Notation.
- Asymptotic notations are the mathematical notations used to describe the running time of an algorithm when the input tends towards a particular value or a limiting value.
- We consider here the the very large input size (which is nearly to infinity) —> therefore we called it “Asymptotic”. For example, consider the function:
—> If we try sketching this function, we can obviously witness that, with x become larger and larger (x → inf). This function seem to be closer to it original version $f(x) = x^2$, in other word, the input size x increase bigger and bigger, 6 times x, plus 100 x and plus 300 will make no meaning. Fun fact: How can we multiply infinity to 6 after that plus 100 multiply infinity and plus 300 to the infinity value 😅?
—> Therefore we automatically remove 6, 100x and 300. Obtaining runtime = x^2 clearly and briefly.
- In order to calculate effectively the efficiency of an algorithm, it is necessary for us to have 3 cases:
- Best case.
- Average case.
- Worst case.
- For example in bubble sort:
- when the input array is already sorted, the time taken by the algorithm is linear i.e. the best case.
- when the input array is in reverse condition, the algorithm takes the maximum time (quadratic) to sort the elements i.e. the worst case.
- when the input array is neither sorted nor in reverse order, then it takes average time. These durations are denoted using asymptotic notations.
(according to programmiz).
-
Big O notation.
Let f and g be functions from the set of integers or the set of real numbers to the set of real numbers. We say that f (x) is O(g(x)) if there are constants C and k such that:
\[|f(x)| \leq C \cdot |g(x)|\]In other word, the growth rate runtime is represented just like a function, Big O is an upper-bound of that function.
Imaging that you have 1 billion dollar in your bank account, however, you spend money for your life is always less than 1 billion dollar. Means that 1 billion dollar is your upper limit of your budget.
—> Big O measures the worst case of the algorithms.
- Big Omega notation.
- The same with Big O.
Let f and g be functions from the set of integers or the set of real numbers to the set of real numbers. We say that f (x) is O(g(x)) if there are constants C and k such that:
\[|f(x)| \geq C \cdot |g(x)|\]In other word, the growth rate runtime is represented just like a function, Big O is an lower-bound of that function.
—> Big Theta measures best case of the algorithms (which we prefer).
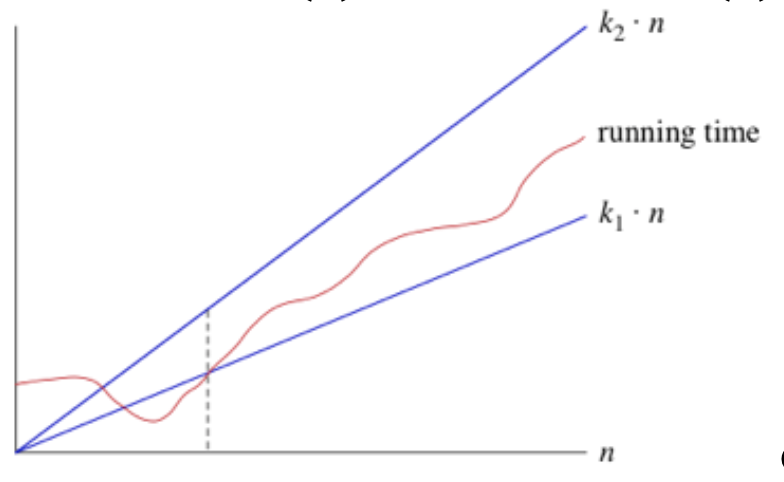
- Big Theta notation.
- It is easy to guess, big Theta is the average case of the algorithms.
- For example, with $\theta(n)$, means that when n is big enough, runtime is smaller than k1 multiply n and bigger than k2 multiply n (see picture below).
- How to calculate runtime?
- Non-recursive:
- Identify basic operation.
- Measure how many times that basic operation execute.
-
Make it into a “Closed form” (discrete math stuff) —> in case there are many basic operation, we take the max of the runtime of those basic operations.
Note: Suppose that f1(x) is O(g1(x)) and that f2(x) is O(g2(x)). Then (f1+f2)(x) is
\[O(max(|g_1(x)|, |g_2(x)|))\]
- Recursive:
- Use recurrence relation: just look at the problem and use the discrete math knowledge. You can google it!.
- Solving the recurrence relation —> we can use some beautiful formula for linear recurrence relation or using generating function. You can also google it! (because it belong to discrete math).
- Another option: we can use naive approach: backward substitution.
- Master theorem.
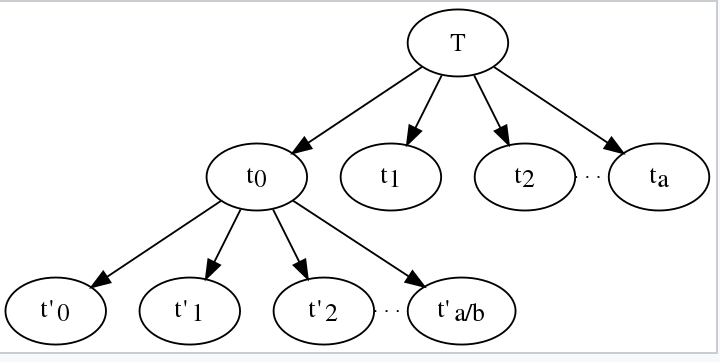
- We have the pseudo code for our recurrence relation:
procedure P(input x of size n): if n < some constant k: Solve x directly without recursion else: Create a subproblems of x, each having size n/b Call procedure p recursively on each subproblem Combine the results from the subproblems
- The master method is a formula for solving recurrence relations of the form:
- Note that f(n) is the time to create the subproblems and combine their results in the above procedure.
-
T(n) has the following asymptotic bounds:
-
If f(n) = O(nlogb a-e), then T(n) = Θ(nlogb a).
-
If f(n) = Θ(nlogb a), then T(n) = Θ(nlogb a * log n).
-
If f(n) = Ω(nlogb a+e), then T(n) = Θ(f(n)) (e > 0 is a constant)
-
- To be more clear, we based on the asymptotic notation, the recursive method can be executed as follow:
-
means that, each time we solving a subproblem of a bigger problem. For example:
int Fibonanci(int n) { if (n == 0) return 0; else if (n == 1) return 1; else return Fibonanci(n-1) + Fibonanci(n-2); } - In Fibonanci code, we use the recurrence relation: T(n) = T(n-1) + T(n-2), which means each time: T will be divided into T(n-1) and T(n-2). For T(n-1) will be divided into T(n-2) + T(n-3) and so on. The same with T(n-2).
- According to Master theorem,
- each time we create subproblem from a bigger problem, the cost increase about a value, in the Fibonanci, it increases approximately 2^n times (google it for more precise value $n^{ log_b(n)}$). If it increases at a certain factor (like 2^n but it is not in our case for Master theorem 😅 sorry), therefore, the value of f(n) will become polynomially smaller than $n^{ log_b(n)}$. Thus, the time complexity is oppressed by the cost of the last level. (like $n^{ log_b(a)}$).
- The same as 1, if the cost for creating is nearly equal, f(n) will become equal to $n^{ log_b(n)}$, then value will be total number of level (or step of execution) (like $n^{log_b a} * log(n)$ )
- The same as 1, if the cost for creating is nearly reduced, f(n) will become bigger than $n^{ log_b(n)}$, then value will be f(n).
- Example: Solving:
—> in case 3 above, T(n) = f(n) = $\theta(n)$
- Non-recursive:
-
Sorting and Searching.
- Binary Search.
- Applied for sorted array.
- Complexity: O(log n) (for worst and best case).
- Space: O(1)
- Divide and conquer algorithms: The main thing is find middle element and compare.
- Can use recursive or iterative method.
- Notice: we use formula: mid = low + (high - low)/2 instead of mid = (low + high) to prevent sum overflow. If there are 2^31 - 1 (or more) elements in array, the program will quickly return -1 😂
// iterative method: int Iterative_Binary_Search(int arr[], int low, int high, int value) { while (low <= high) { int mid = low + (high - low)/2; if (arr[mid] == value) { return mid; } if (arr[mid] < value) { low = mid + 1; } else { high = mid - 1; } } return -1; } // recursive method int Recurvise_Binary_Search (int arr[], int low, int high, int value) { if (high >= low) { int mid = low + (high - low)/2; if (arr[mid] == value) { return mid; } if (arr[mid] > value) { return Binary_Search(arr, low, mid - 1, value); } return Binary_Search(arr, mid + 1, high, value); } return -1; } - Interpolation Search.
- Interpolation search is faster than binary search for some special case.
- Binary Search goes to the middle element to check irrespective of search-key. On the other hand, interpolation search may go to different locations according to the value of the key being searched.
- The main different here is the formula for mid element.
- Proof and Formula:
Let's assume that the elements of the array are linearly distributed. General equation of line : y = m*x + c. y is the value in the array and x is its index. Now putting value of lo,hi and x in the equation arr[hi] = m*hi+c ----(1) arr[lo] = m*lo+c ----(2) x = m*pos + c ----(3) m = (arr[hi] - arr[lo] )/ (hi - lo) subtracting eqxn (2) from (3) x - arr[lo] = m * (pos - lo) lo + (x - arr[lo])/m = pos pos = lo + (x - arr[lo]) *(hi - lo)/(arr[hi] - arr[lo])- Can do it in recursive and iterative like binary, just use pos instead of mid.
—> works better than Binary Search for a Sorted and Uniformly Distributed array.
- Complexity: O(log(log (n))) (best case), O(n) (worst case — i.e: where the numerical values of the keys increase exponentially).
- Space: O(1)
—> consider the elements in array when using Interpolation Sort.
- Binary Search.
Blog and stuffs